
About Me
I’m a second-year master’s student in Automation at Beijing Institute of Technology (BIT), focusing on autonomous exploration systems and its supporting technologies, such as SLAM, motion planning, and multi-robot collaboration. As a member of State Key Laboratory of Autonomous Intelligent Unmanned Systems, I’m advised by Prof. Chengpu Yu. I received my B.Eng. degree in Measurement & Control Technology from China University of Mining & Technology (CUMT), Beijing in 2021.
Robots are not just our assistants but can also be companions. I’m excited to continuously enhance their autonomy and intelligence, thus creating a better life.
📝 Publications
Articles
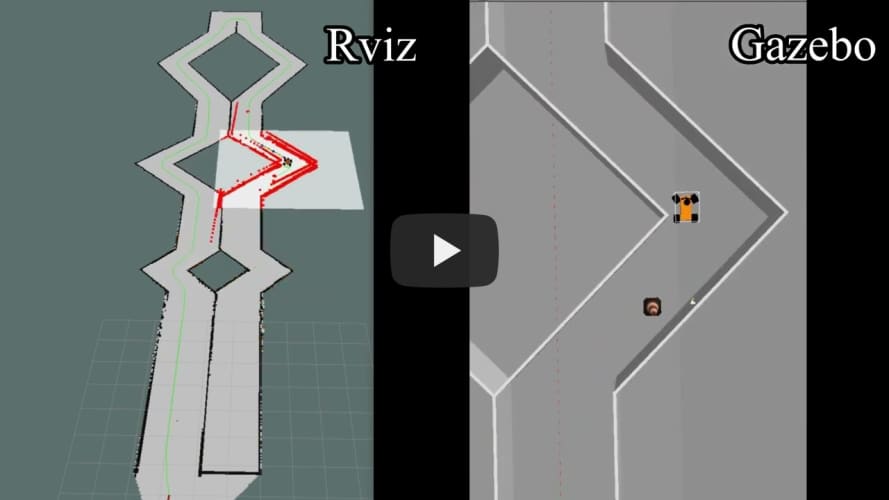
TDLE: 2D Lidar Exploration with Hierarchical Planning Using Regional Division
IEEE International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 2023
Xuyang Zhao, Chengpu Yu, Erpei Xu and Yixuan Liu
- Proposed an exploration system that uses global dynamic regional division and localized metric evaluation to achieve efficient autonomous mapping with low computational requirements. The proposed method can run at high frequencies (>100Hz) on low-power edge platforms like Jetson Nano, while offering up to 57.57% efficiency improvement compared to former methods.
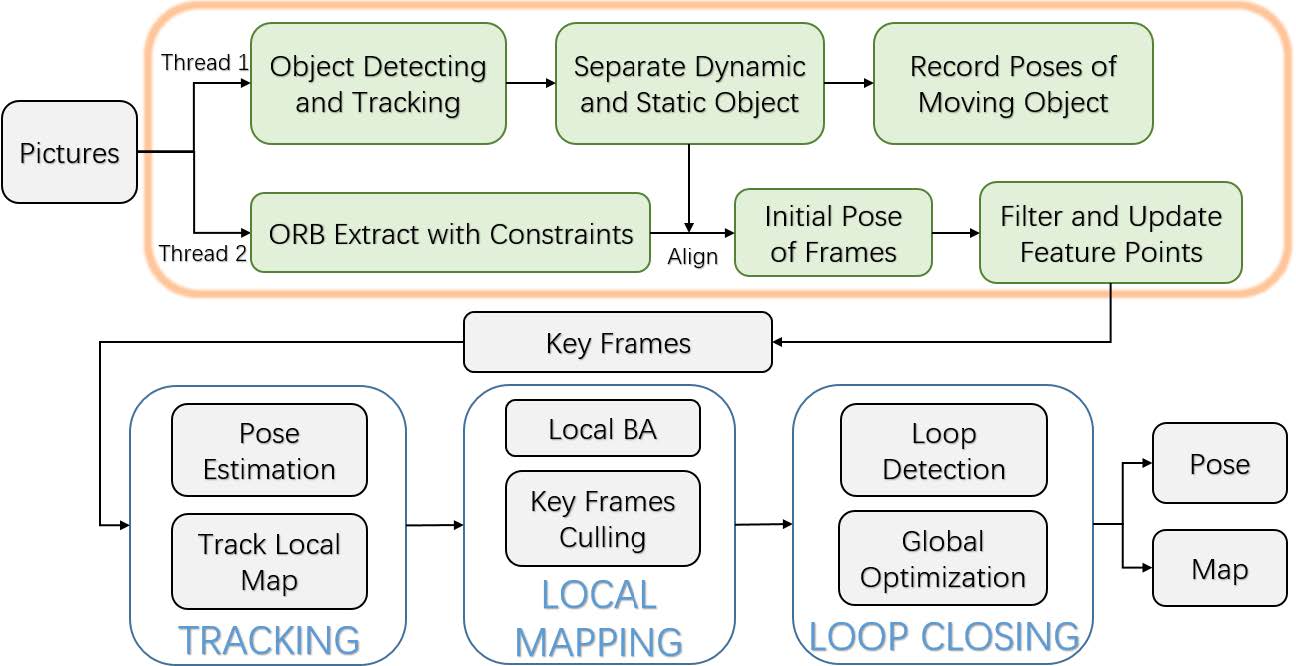
DOTF-SLAM: Real-time Dynamic SLAM Using Object Tracking and Key-point Filtering
IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 2023
Yixuan Liu, Xuyang Zhao, Zhengmao Liu, Chengpu Yu
- Eliminate dynamic feature points while retaining static points of movable objects to improve robustness. The localization accuracy is improved by up to 21.69% compared with ORB-SLAM in the KITTI dataset.
Patents
- Chengpu Yu, Xuyang Zhao, Dajian Zhou, “An Indoor Mapping Method And Device With Autonomous Exploration”, Chinese Patent 20211114092.1, 2021.
- Chengpu Yu, Xuyang Zhao, Yixuan Liu, “A Lidar Exploration and Mapping Method Based on Regional Segmentation”, Chinese Patent 202311191164.2, 2023.
- Chengpu Yu, Dajian Zhou, Xuyang Zhao, “An 3D Inversion Positioning Method Based on Ultra-wideband (UWB).”, Chinese Patent 202110893866.X, 2021.
🔬 Projects
-
Oct. 2021 - now, Indoor Navigation and Detection Based on Air-Ground Platform Collaboration. (Core Member)
[National Key R&D Program]
In disaster relief scenarios, there is a safety risk for rescuers when they enter damaged buildings, such as those affected by an earthquake.
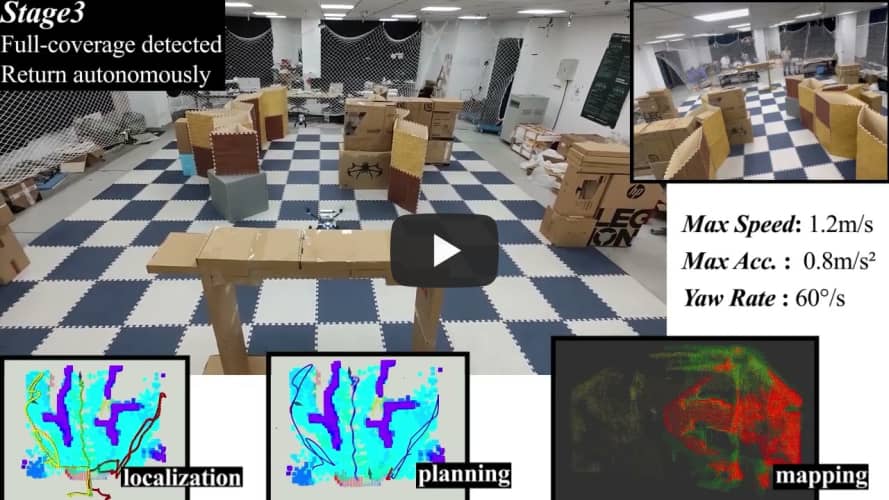
To tackle this issue, we have developed a Solid-state LiDAR exploration and mapping system. The proposed system conduct indoor information surveys and return autonomously after completion, helping to inspect the internal environment and find trapped people.
The whole process requires no remote control or pre-specified routes, as the decision is made entirely by the on-board processing unit.
 |
 |
-
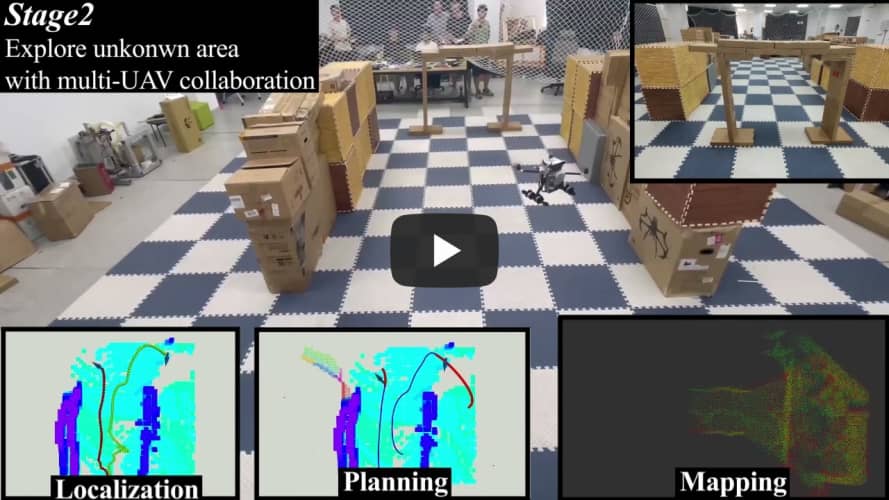
Jul. 2022 - now, Collaborative Perception and Environment Modeling of Unmanned Swarms. (Core Member)
[Industry-Academia Collaborative Innovation Fund]
Built an unmanned swarm that support any number of intelligent agents for efficient collaborative exploration: (1) built small drones from scratch; (2) established UDP communication to exchange custom compact messages; (3) designed a scalable dynamic task allocation strategy.
-
May 2020 - Sept. 2020, Intelligent Car Racing Competition. (Team Leader)
[China’s 15th National Collegiate Smart Car Race]
To achieve higher speed in the racing, besides device adjustment and tuning, we carried out the following tasks: (1) Distortion correction for LiDAR mapping process; (2) Introduction of strong constraints for obstacle avoidance in local planners; (3) Construction of LiDAR-IMU Odometry (LIO).
Successfully advanced in the simulation competition of the North China division and subsequently won the national second prize in the final race.
 |
 |
📖 Educations
- Sept. 2021 - Jul. 2024 (Present), Master’s student of Control Engineering, Beijing Institute of Technology. (Grade: 85.26/100.0)
- Sept. 2017 - Jul. 2021, Bachelor of Measurement & Control Technology, China University of Mining & Technology, Beijing. (Grade: 88.52/100)
💻 Internships
- 2023.05 - 2023.06, PhiGent Robotics, Autonomous Driving R&D Intern.
🏅 Honors and Awards
- 2022.09 First Class Scholarship of Beijing Institute of Technology.
- 2021.06 Outstanding Graduates of China University of Mining & Technology, Beijing. (Top 5%)
- 2021.06 First Prize of Excellent Bachelor Thesis of China University of Mining & Technology, Beijing. (Top 1%)
- 2020.09 National Second Prize of Collegiate Smart Car Competition.
📚 Skills
Extensive experience in Mobile Robot/Unmanned Aerial Vehicle(UAV) development, both software and hardware.
- Robotics Dev.: ROS, PX4, Gazebo, PCL, Eigen, Ceres, etc.
- Programming: C/C++, Python, LaTeX
- Dev. Tools: Git, Linux & Shell, Docker, etc.
- Language: English (CET-6: 551, TOEFL: 101), Chinese (Native)